 # Frigate - Realtime Object Detection for IP Cameras
**Note:** This version requires the use of a [Google Coral USB Accelerator](https://coral.withgoogle.com/products/accelerator/)
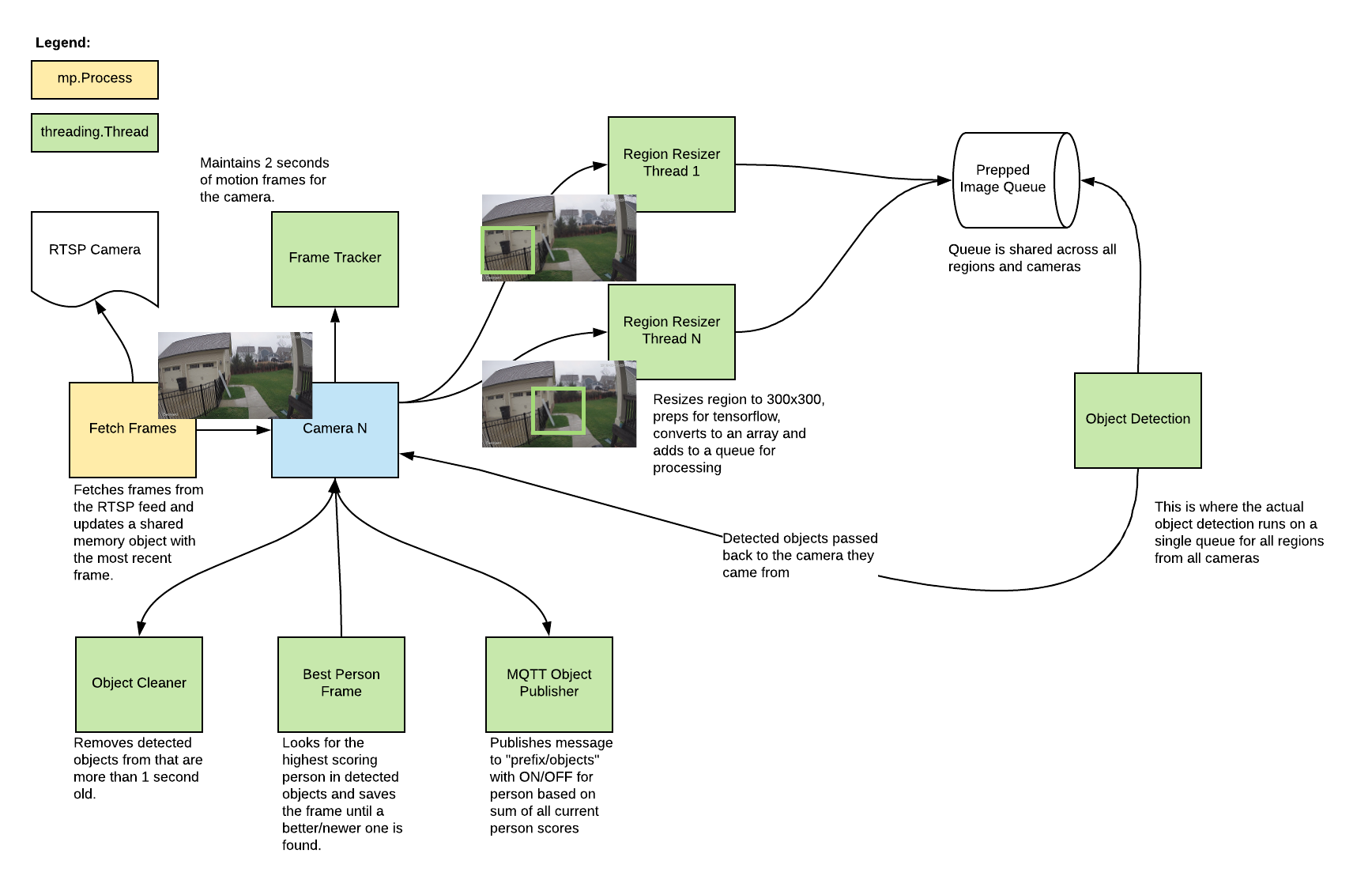
Uses OpenCV and Tensorflow to perform realtime object detection locally for IP cameras. Designed for integration with HomeAssistant or others via MQTT.
- Leverages multiprocessing and threads heavily with an emphasis on realtime over processing every frame
- Allows you to define specific regions (squares) in the image to look for objects
- No motion detection (for now)
- Object detection with Tensorflow runs in a separate thread
- Object info is published over MQTT for integration into HomeAssistant as a binary sensor
- An endpoint is available to view an MJPEG stream for debugging
## Example video (from older version)
You see multiple bounding boxes because it draws bounding boxes from all frames in the past 1 second where a person was detected. Not all of the bounding boxes were from the current frame.
[](http://www.youtube.com/watch?v=nqHbCtyo4dY "Frigate")
## Getting Started
Build the container with
```
docker build -t frigate .
```
The `mobilenet_ssd_v2_coco_quant_postprocess_edgetpu.tflite` model is included and used by default. You can use your own model and labels by mounting files in the container at `/frozen_inference_graph.pb` and `/label_map.pbtext`. Models must be compatible with the Coral according to [this](https://coral.withgoogle.com/models/).
Run the container with
```
docker run --rm \
--privileged \
-v /dev/bus/usb:/dev/bus/usb \
-v :/config:ro \
-v /etc/localtime:/etc/localtime:ro \
-p 5000:5000 \
-e FRIGATE_RTSP_PASSWORD='password' \
frigate:latest
```
Example docker-compose:
```
frigate:
container_name: frigate
restart: unless-stopped
privileged: true
image: frigate:latest
volumes:
- /dev/bus/usb:/dev/bus/usb
- /etc/localtime:/etc/localtime:ro
- :/config
ports:
- "5000:5000"
environment:
FRIGATE_RTSP_PASSWORD: "password"
```
A `config.yml` file must exist in the `config` directory. See example [here](config/config.yml) and device specific info can be found [here](docs/DEVICES.md).
Access the mjpeg stream at `http://localhost:5000/` and the best person snapshot at `http://localhost:5000//best_person.jpg`
## Integration with HomeAssistant
```
camera:
- name: Camera Last Person
platform: mqtt
topic: frigate//snapshot
binary_sensor:
- name: Camera Person
platform: mqtt
state_topic: "frigate//objects"
value_template: '{{ value_json.person }}'
device_class: motion
availability_topic: "frigate/available"
automation:
- alias: Alert me if a person is detected while armed away
trigger:
platform: state
entity_id: binary_sensor.camera_person
from: 'off'
to: 'on'
condition:
- condition: state
entity_id: alarm_control_panel.home_alarm
state: armed_away
action:
- service: notify.user_telegram
data:
message: "A person was detected."
data:
photo:
- url: http://:5000//best_person.jpg
caption: A person was detected.
```
## Tips
- Lower the framerate of the video feed on the camera to reduce the CPU usage for capturing the feed
## Future improvements
- [x] Remove motion detection for now
- [x] Try running object detection in a thread rather than a process
- [x] Implement min person size again
- [x] Switch to a config file
- [x] Handle multiple cameras in the same container
- [ ] Attempt to figure out coral symlinking
- [ ] Add object list to config with min scores for mqtt
- [ ] Move mjpeg encoding to a separate process
- [ ] Simplify motion detection (check entire image against mask, resize instead of gaussian blur)
- [ ] See if motion detection is even worth running
- [ ] Scan for people across entire image rather than specfic regions
- [ ] Dynamically resize detection area and follow people
- [ ] Add ability to turn detection on and off via MQTT
- [ ] Output movie clips of people for notifications, etc.
- [ ] Integrate with homeassistant push camera
- [ ] Merge bounding boxes that span multiple regions
- [ ] Implement mode to save labeled objects for training
- [ ] Try and reduce CPU usage by simplifying the tensorflow model to just include the objects we care about
- [ ] Look into GPU accelerated decoding of RTSP stream
- [ ] Send video over a socket and use JSMPEG
- [x] Look into neural compute stick
# Frigate - Realtime Object Detection for IP Cameras
**Note:** This version requires the use of a [Google Coral USB Accelerator](https://coral.withgoogle.com/products/accelerator/)
Uses OpenCV and Tensorflow to perform realtime object detection locally for IP cameras. Designed for integration with HomeAssistant or others via MQTT.
- Leverages multiprocessing and threads heavily with an emphasis on realtime over processing every frame
- Allows you to define specific regions (squares) in the image to look for objects
- No motion detection (for now)
- Object detection with Tensorflow runs in a separate thread
- Object info is published over MQTT for integration into HomeAssistant as a binary sensor
- An endpoint is available to view an MJPEG stream for debugging

## Example video (from older version)
You see multiple bounding boxes because it draws bounding boxes from all frames in the past 1 second where a person was detected. Not all of the bounding boxes were from the current frame.
[](http://www.youtube.com/watch?v=nqHbCtyo4dY "Frigate")
## Getting Started
Build the container with
```
docker build -t frigate .
```
The `mobilenet_ssd_v2_coco_quant_postprocess_edgetpu.tflite` model is included and used by default. You can use your own model and labels by mounting files in the container at `/frozen_inference_graph.pb` and `/label_map.pbtext`. Models must be compatible with the Coral according to [this](https://coral.withgoogle.com/models/).
Run the container with
```
docker run --rm \
--privileged \
-v /dev/bus/usb:/dev/bus/usb \
-v :/config:ro \
-v /etc/localtime:/etc/localtime:ro \
-p 5000:5000 \
-e FRIGATE_RTSP_PASSWORD='password' \
frigate:latest
```
Example docker-compose:
```
frigate:
container_name: frigate
restart: unless-stopped
privileged: true
image: frigate:latest
volumes:
- /dev/bus/usb:/dev/bus/usb
- /etc/localtime:/etc/localtime:ro
- :/config
ports:
- "5000:5000"
environment:
FRIGATE_RTSP_PASSWORD: "password"
```
A `config.yml` file must exist in the `config` directory. See example [here](config/config.yml) and device specific info can be found [here](docs/DEVICES.md).
Access the mjpeg stream at `http://localhost:5000/` and the best person snapshot at `http://localhost:5000//best_person.jpg`
## Integration with HomeAssistant
```
camera:
- name: Camera Last Person
platform: mqtt
topic: frigate//snapshot
binary_sensor:
- name: Camera Person
platform: mqtt
state_topic: "frigate//objects"
value_template: '{{ value_json.person }}'
device_class: motion
availability_topic: "frigate/available"
automation:
- alias: Alert me if a person is detected while armed away
trigger:
platform: state
entity_id: binary_sensor.camera_person
from: 'off'
to: 'on'
condition:
- condition: state
entity_id: alarm_control_panel.home_alarm
state: armed_away
action:
- service: notify.user_telegram
data:
message: "A person was detected."
data:
photo:
- url: http://:5000//best_person.jpg
caption: A person was detected.
```
## Tips
- Lower the framerate of the video feed on the camera to reduce the CPU usage for capturing the feed
## Future improvements
- [x] Remove motion detection for now
- [x] Try running object detection in a thread rather than a process
- [x] Implement min person size again
- [x] Switch to a config file
- [x] Handle multiple cameras in the same container
- [ ] Attempt to figure out coral symlinking
- [ ] Add object list to config with min scores for mqtt
- [ ] Move mjpeg encoding to a separate process
- [ ] Simplify motion detection (check entire image against mask, resize instead of gaussian blur)
- [ ] See if motion detection is even worth running
- [ ] Scan for people across entire image rather than specfic regions
- [ ] Dynamically resize detection area and follow people
- [ ] Add ability to turn detection on and off via MQTT
- [ ] Output movie clips of people for notifications, etc.
- [ ] Integrate with homeassistant push camera
- [ ] Merge bounding boxes that span multiple regions
- [ ] Implement mode to save labeled objects for training
- [ ] Try and reduce CPU usage by simplifying the tensorflow model to just include the objects we care about
- [ ] Look into GPU accelerated decoding of RTSP stream
- [ ] Send video over a socket and use JSMPEG
- [x] Look into neural compute stick