4.7 KiB
![]()
Frigate - Realtime Object Detection for IP Cameras
Note: This version requires the use of a Google Coral USB Accelerator
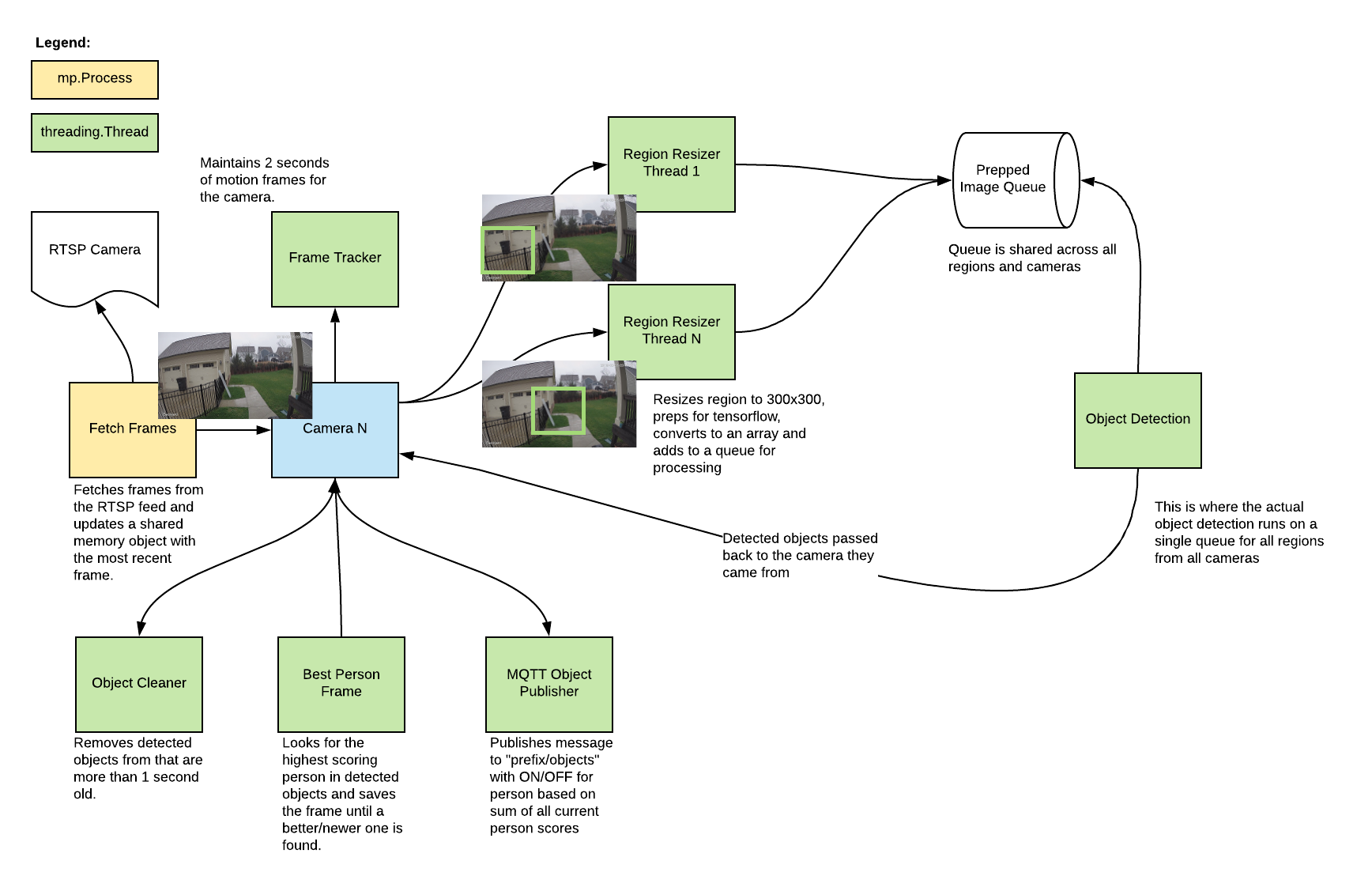
Uses OpenCV and Tensorflow to perform realtime object detection locally for IP cameras. Designed for integration with HomeAssistant or others via MQTT.
- Leverages multiprocessing and threads heavily with an emphasis on realtime over processing every frame
- Allows you to define specific regions (squares) in the image to look for objects
- No motion detection (for now)
- Object detection with Tensorflow runs in a separate thread
- Object info is published over MQTT for integration into HomeAssistant as a binary sensor
- An endpoint is available to view an MJPEG stream for debugging
Example video (from older version)
You see multiple bounding boxes because it draws bounding boxes from all frames in the past 1 second where a person was detected. Not all of the bounding boxes were from the current frame.

Getting Started
Build the container with
docker build -t frigate .
The mobilenet_ssd_v2_coco_quant_postprocess_edgetpu.tflite model is included and used by default. You can use your own model and labels by mounting files in the container at /frozen_inference_graph.pb and /label_map.pbtext. Models must be compatible with the Coral according to this.
Run the container with
docker run --rm \
--privileged \
-v /dev/bus/usb:/dev/bus/usb \
-v <path_to_config_dir>:/config:ro \
-v /etc/localtime:/etc/localtime:ro \
-p 5000:5000 \
-e FRIGATE_RTSP_PASSWORD='password' \
frigate:latest
Example docker-compose:
frigate:
container_name: frigate
restart: unless-stopped
privileged: true
image: frigate:latest
volumes:
- /dev/bus/usb:/dev/bus/usb
- /etc/localtime:/etc/localtime:ro
- <path_to_config>:/config
ports:
- "5000:5000"
environment:
FRIGATE_RTSP_PASSWORD: "password"
A config.yml file must exist in the config directory. See example here.
Access the mjpeg stream at http://localhost:5000/<camera_name> and the best person snapshot at http://localhost:5000/<camera_name>/best_person.jpg
Integration with HomeAssistant
camera:
- name: Camera Last Person
platform: mqtt
topic: frigate/<camera_name>/snapshot
binary_sensor:
- name: Camera Person
platform: mqtt
state_topic: "frigate/<camera_name>/objects"
value_template: '{{ value_json.person }}'
device_class: motion
availability_topic: "frigate/available"
automation:
- alias: Alert me if a person is detected while armed away
trigger:
platform: state
entity_id: binary_sensor.camera_person
from: 'off'
to: 'on'
condition:
- condition: state
entity_id: alarm_control_panel.home_alarm
state: armed_away
action:
- service: notify.user_telegram
data:
message: "A person was detected."
data:
photo:
- url: http://<ip>:5000/<camera_name>/best_person.jpg
caption: A person was detected.
Tips
- Lower the framerate of the video feed on the camera to reduce the CPU usage for capturing the feed
Future improvements
- Remove motion detection for now
- Try running object detection in a thread rather than a process
- Implement min person size again
- Switch to a config file
- Handle multiple cameras in the same container
- Attempt to figure out coral symlinking
- Add object list to config with min scores for mqtt
- Move mjpeg encoding to a separate process
- Simplify motion detection (check entire image against mask, resize instead of gaussian blur)
- See if motion detection is even worth running
- Scan for people across entire image rather than specfic regions
- Dynamically resize detection area and follow people
- Add ability to turn detection on and off via MQTT
- Output movie clips of people for notifications, etc.
- Integrate with homeassistant push camera
- Merge bounding boxes that span multiple regions
- Implement mode to save labeled objects for training
- Try and reduce CPU usage by simplifying the tensorflow model to just include the objects we care about
- Look into GPU accelerated decoding of RTSP stream
- Send video over a socket and use JSMPEG
- Look into neural compute stick