| config | ||
| frigate | ||
| .dockerignore | ||
| .gitignore | ||
| detect_objects.py | ||
| diagram.png | ||
| Dockerfile | ||
| LICENSE | ||
| README.md | ||
{kind=link}
Frigate - Realtime Object Detection for RTSP Cameras
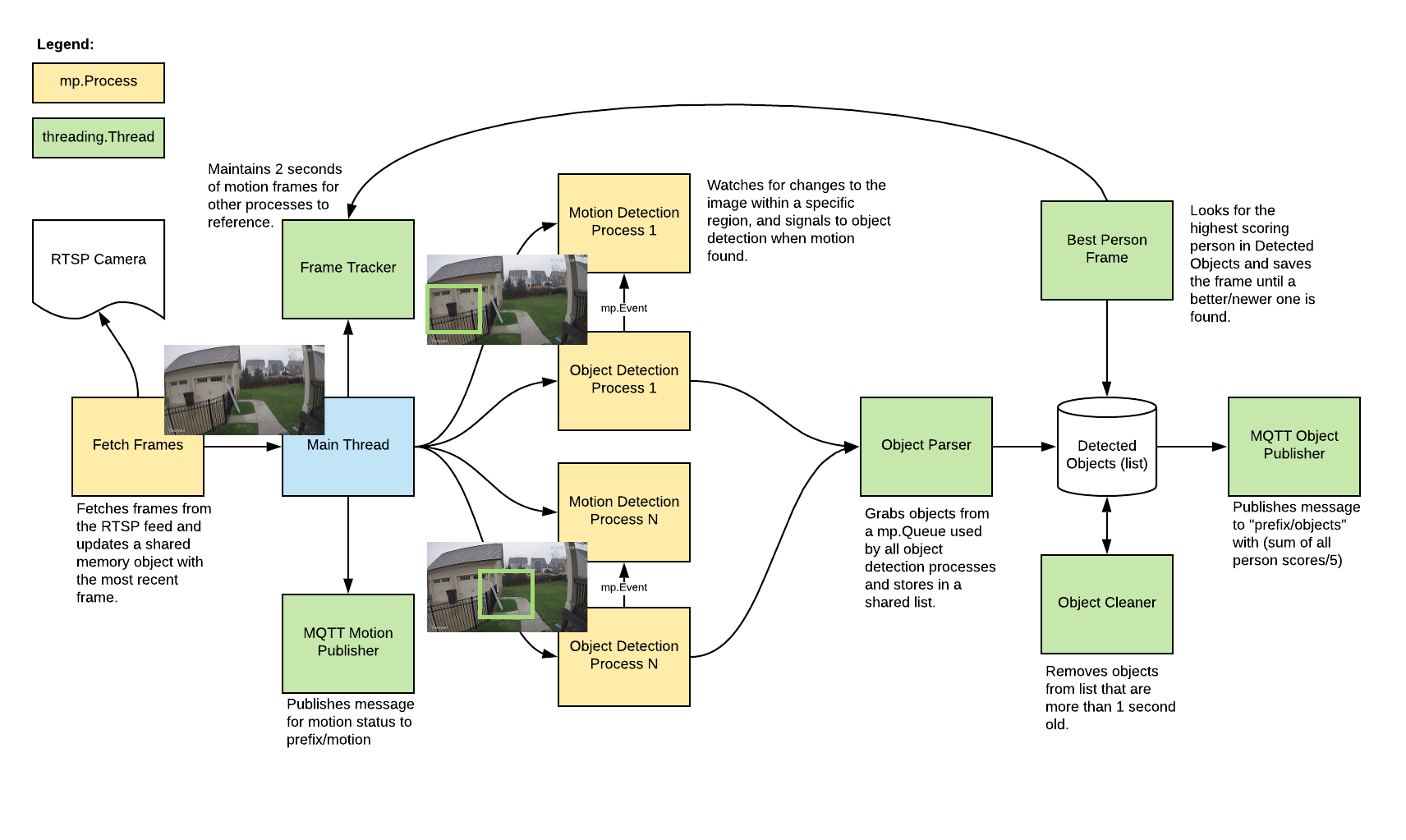
Uses OpenCV and Tensorflow to perform realtime object detection locally for RTSP cameras. Designed for integration with HomeAssistant or others via MQTT.
- Leverages multiprocessing and threads heavily with an emphasis on realtime over processing every frame
- Allows you to define specific regions (squares) in the image to look for motion/objects
- Motion detection runs in a separate process per region and signals to object detection to avoid wasting CPU cycles looking for objects when there is no motion
- Object detection with Tensorflow runs in a separate process per region
- Detected objects are placed on a shared mp.Queue and aggregated into a list of recently detected objects in a separate thread
- A person score is calculated as the sum of all scores/5
- Motion and object info is published over MQTT for integration into HomeAssistant or others
- An endpoint is available to view an MJPEG stream for debugging
Example video
You see multiple bounding boxes because it draws bounding boxes from all frames in the past 1 second where a person was detected. Not all of the bounding boxes were from the current frame.

Getting Started
Build the container with
docker build -t frigate .
Download a model from the zoo.
Download the cooresponding label map from here.
Run the container with
docker run --rm \
-v <path_to_frozen_detection_graph.pb>:/frozen_inference_graph.pb:ro \
-v <path_to_labelmap.pbtext>:/label_map.pbtext:ro \
-v <path_to_config_dir>:/config:ro \
-p 5000:5000 \
-e RTSP_URL='<rtsp_url>' \
-e REGIONS='<box_size_1>,<x_offset_1>,<y_offset_1>,<min_person_size_1>,<min_motion_size_1>,<mask_file_1>:<box_size_2>,<x_offset_2>,<y_offset_2>,<min_person_size_2>,<min_motion_size_2>,<mask_file_2>' \
-e MQTT_HOST='your.mqtthost.com' \
-e MQTT_USER='username' \
-e MQTT_PASS='password' \
-e MQTT_TOPIC_PREFIX='cameras/1' \
-e DEBUG='0' \
frigate:latest
Example docker-compose:
frigate:
container_name: frigate
restart: unless-stopped
image: frigate:latest
volumes:
- <path_to_frozen_detection_graph.pb>:/frozen_inference_graph.pb:ro
- <path_to_labelmap.pbtext>:/label_map.pbtext:ro
- <path_to_config>:/config
ports:
- "127.0.0.1:5000:5000"
environment:
RTSP_URL: "<rtsp_url>"
REGIONS: "<box_size_1>,<x_offset_1>,<y_offset_1>,<min_person_size_1>,<min_motion_size_1>,<mask_file_1>:<box_size_2>,<x_offset_2>,<y_offset_2>,<min_person_size_2>,<min_motion_size_2>,<mask_file_2>"
MQTT_HOST: "your.mqtthost.com"
MQTT_USER: "username" #optional
MQTT_PASS: "password" #optional
MQTT_TOPIC_PREFIX: "cameras/1"
DEBUG: "0"
Here is an example REGIONS env variable:
350,0,300,5000,200,mask-0-300.bmp:400,350,250,2000,200,mask-350-250.bmp:400,750,250,2000,200,mask-750-250.bmp
First region broken down (all are required):
350- size of the square (350px by 350px)0- x coordinate of upper left corner (top left of image is 0,0)300- y coordinate of upper left corner (top left of image is 0,0)5000- minimum person bounding box size (width*height for bounding box of identified person)200- minimum number of changed pixels to trigger motionmask-0-300.bmp- a bmp file with the masked regions as pure black, must be the same size as the region
Mask files go in the /config directory.
Access the mjpeg stream at http://localhost:5000
Integration with HomeAssistant
camera:
- name: Camera Last Person
platform: generic
still_image_url: http://<ip>:5000/best_person.jpg
binary_sensor:
- name: Camera Motion
platform: mqtt
state_topic: "cameras/1/motion"
device_class: motion
availability_topic: "cameras/1/available"
sensor:
- name: Camera Person Score
platform: mqtt
state_topic: "cameras/1/objects"
value_template: '{{ value_json.person }}'
unit_of_measurement: '%'
availability_topic: "cameras/1/available"
Tips
- Lower the framerate of the RTSP feed on the camera to reduce the CPU usage for capturing the feed
- Use SSDLite models to reduce CPU usage
Future improvements
- Build tensorflow from source for CPU optimizations
- Add ability to turn detection on and off via MQTT
- MQTT motion occasionally gets stuck ON
- Output movie clips of people for notifications, etc.
- Integrate with homeassistant push camera
- Merge bounding boxes that span multiple regions
- Switch to a config file
- Allow motion regions to be different than object detection regions
- Implement mode to save labeled objects for training
- Try and reduce CPU usage by simplifying the tensorflow model to just include the objects we care about
- Look into GPU accelerated decoding of RTSP stream
- Send video over a socket and use JSMPEG
- Look into neural compute stick
Building Tensorflow from source for CPU optimizations
https://www.tensorflow.org/install/source#docker_linux_builds
used tensorflow/tensorflow:1.12.0-devel-py3
Optimizing the graph (cant say I saw much difference in CPU usage)
docker run -it -v ${PWD}:/lab -v ${PWD}/../back_camera_model/models/ssd_mobilenet_v2_coco_2018_03_29/frozen_inference_graph.pb:/frozen_inference_graph.pb:ro tensorflow/tensorflow:1.12.0-devel-py3 bash
bazel build tensorflow/tools/graph_transforms:transform_graph
bazel-bin/tensorflow/tools/graph_transforms/transform_graph \
--in_graph=/frozen_inference_graph.pb \
--out_graph=/lab/optimized_inception_graph.pb \
--inputs='image_tensor' \
--outputs='num_detections,detection_scores,detection_boxes,detection_classes' \
--transforms='
strip_unused_nodes(type=float, shape="1,300,300,3")
remove_nodes(op=Identity, op=CheckNumerics)
fold_constants(ignore_errors=true)
fold_batch_norms
fold_old_batch_norms'